

Die korrekte Auslegung eines Propellerantriebs ist kompliziert. Während häufig die Motorleistung im Mittelpunkt der Betrachtung steht, ist für das Betriebsverhalten eines Propellerantriebs vor allem die Drehmomentcharakteristik entscheidend. Dabei müssen das vom Motor verfügbare Drehmoment und das vom Propeller erforderliche Drehmoment aufeinander abgestimmt sein.
Für die Auswahl eines geeigneten Elektromotors ist deshalb zu untersuchen, welches Drehmoment die Maschine über den Drehzahlbereich bereitstellen kann. Dieses Drehmoment muss ausreichen, um das vom Propeller erzeugte Gegenmoment zu überwinden und die gewünschte Betriebsdrehzahl zu erreichen.
Die Bedeutung der Propellerkennlinien
Jeder Schiffspropeller besitzt charakteristische Kennlinien, die den Zusammenhang zwischen Drehzahl, Schubkraft und benötigtem Drehmoment beschreiben. Diese sogenannten „Robinson-Kurven“ sind eine wichtige Grundlage für die Auslegung eines Antriebssystems. Im professionellen Schiffbau werden solche Kennlinien meist mithilfe von CFD-Simulationen oder umfangreichen Messreihen ermittelt.
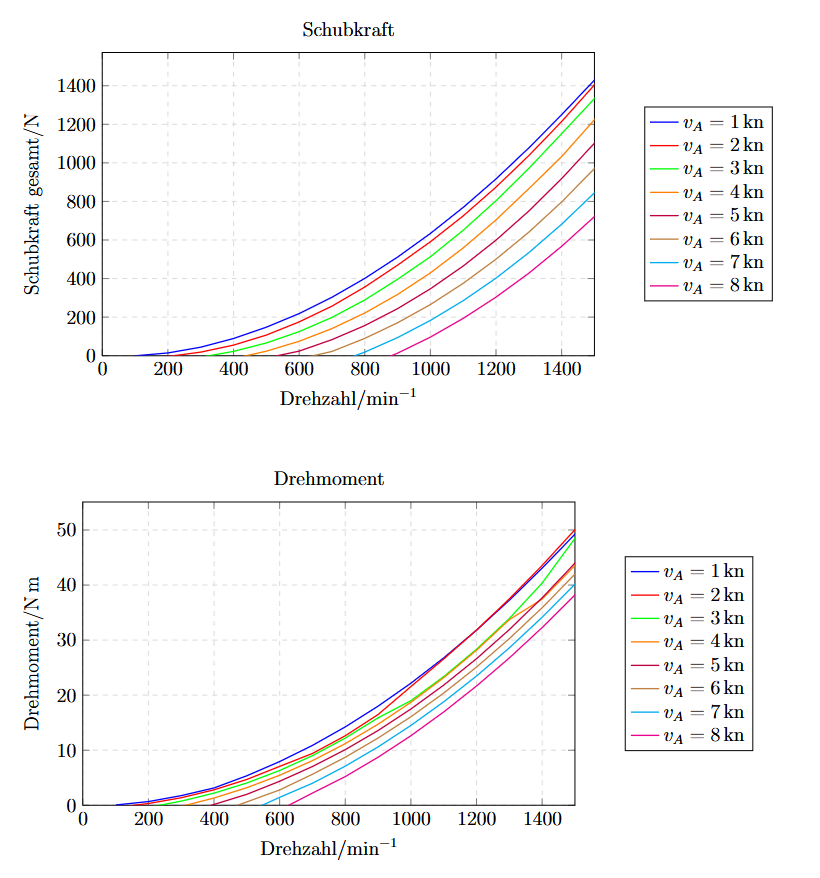
Das grundsätzliche Verhalten lässt sich jedoch auch näherungsweise beschreiben: Das vom Propeller benötigte Drehmoment steigt annähernd quadratisch mit der Drehzahl an. Verdoppelt sich die Drehzahl, vervierfacht sich daher ungefähr das erforderliche Drehmoment. Die genaue Form der Kurve hängt von der Geometrie des Propellers ab. Propeller mit großem Durchmesser und hoher Steigung benötigen bereits bei niedrigen Drehzahlen deutlich mehr Drehmoment als kleinere Propeller mit geringer Steigung.
Diese Eigenschaft erklärt auch, weshalb der Energiebedarf eines Propellerantriebs bei steigender Drehzahl sehr stark zunimmt. Die benötigte Antriebsleistung ergibt sich aus dem Produkt von Drehmoment und Drehzahl (Leistung = Drehmoment ⋅ Drehzahl). Da das erforderliche Drehmoment eines Propellers näherungsweise quadratisch zunimmt, wächst die Leistung sogar mit der dritten Potenz. Wird die Drehzahl verdoppelt, vervierfacht sich dementsprechend zunächst das benötigte Drehmoment. Da gleichzeitig die Drehzahl selbst auf das Doppelte ansteigt, erhöht sich die erforderliche Leistung um den Faktor acht. Mit anderen Worten: Eine Verdoppelung der Drehzahl erfordert ungefähr die achtfache!!! Antriebsleistung.
Für die Auslegung eines Antriebssystems ist die Kenntnis der Propellerkennlinie daher eigentlich von zentraler Bedeutung. Idealerweise wird diese vom Propellerhersteller bereitgestellt. Im Sportbootbereich sind entsprechende Angaben jedoch nur selten verfügbar. Stattdessen finden sich häufig lediglich Empfehlungen für bestimmte Propellergrößen oder vom Propellerhersteller die Leistungsangabe einer passenden Antriebsmaschine. Die Nennleistung eines Motors sagt jedoch nur begrenzt etwas darüber aus, wie leistungsstark der Antrieb sein wird. Entscheidend ist letztlich nicht die maximale Leistung der Antriebsmaschine, sondern welches Drehmoment der Motor bei den für den Betrieb relevanten Drehzahlen bereitstellen kann.
Warum die reine Leistungsangabe oft irreführend ist, wird im nächsten Abschnitt deutlich. Sie erklärt auch, weshalb die in unserem Umbau verwendete 5-kW-Elektromaschine in der Praxis eine vergleichbare Antriebsleistung erzielt wie der zuvor eingesetzte 11,5-kW-Dieselmotor.
Rekonstruktion der Propellerkennlinie
Die Timpe Te hat einen zweiflügeliger Propeller mit 12 Zoll Durchmesser und 9 Zoll Steigung. Da keine Herstellerdaten zur Propellerkennlinie vorlagen, wurde diese anhand von Messungen während des Betriebs näherungsweise rekonstruiert. Hierzu wurde die elektrische Leistungsentnahme an der Batterie bei unterschiedlichen Drehzahlen erfasst und daraus auf das vom Propeller benötigte Drehmoment zurückgeschlossen.
Zwischen der aus der Batterie entnommenen elektrischen Leistung und der tatsächlich an der Propellerwelle verfügbaren mechanischen Leistung treten natürlich verschiedene Verluste auf. Dazu zählen unter anderem ohmsche Verluste in den Leitungen, Schaltverluste in der Leistungselektronik sowie mechanische und weitere Verluste im Elektromotor selbst. Um den Einfluss dieser Effekte möglichst gering zu halten, wurde der untere Drehzahlbereich (bis 600 U/min) betrachtet, in dem die Verluste noch vergleichsweise klein sind und die Auswertung nur geringfügig verfälschen. Auf Basis dieser Messwerte konnte die Kennlinie anschließend extrapoliert werden.
Die Messungen wurden bei festgebundenem Boot durchgeführt. Da somit keine Anströmgeschwindigkeit des Propellers durch die Fahrtbewegung vorhanden war, stellen die ermittelten Werte eine statische Belastungssituation dar.
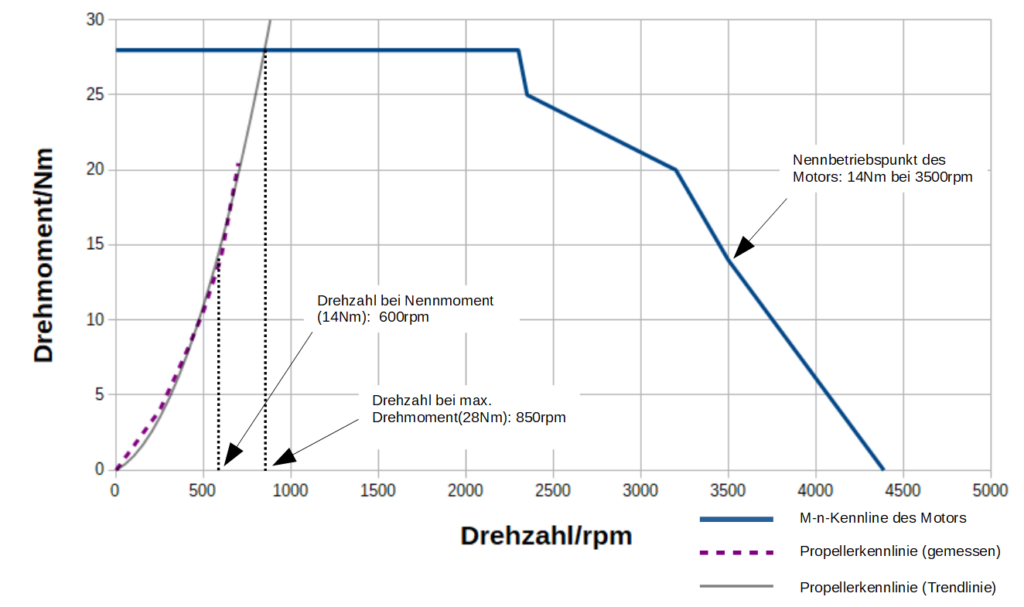
Der Drehmomentkennlinie des Propellers steht die Drehmoment-Drehzahl-Kennlinie des Elektromotors gegenüber. Für den Betrieb des Antriebs ist dabei entscheidend, dass der Motor bei jeder Drehzahl mindestens das vom Propeller geforderte Drehmoment bereitstellen kann.
Der Schnittpunkt beider Kennlinien markiert den maximal erreichbaren Betriebspunkt. An diesem Punkt entspricht das vom Motor verfügbare Drehmoment genau dem vom Propeller benötigten Drehmoment. Eine weitere Erhöhung der Drehzahl ist nicht möglich, da der Motor das zusätzlich erforderliche Drehmoment nicht mehr aufbringen kann.
Die Drehmoment-Drehzahl-Kennlinie des Elektromotors
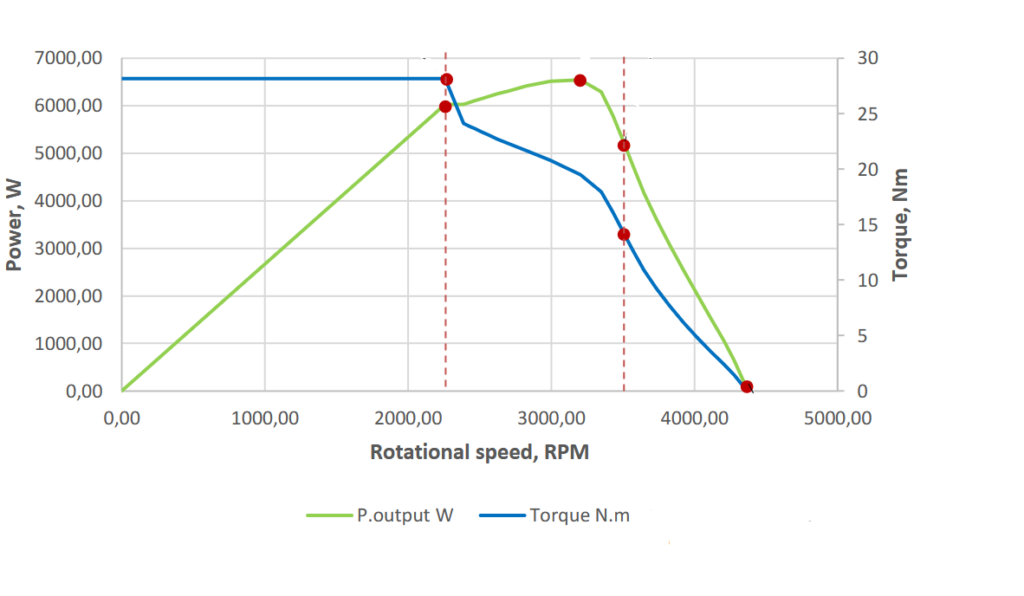
Der eingesetzte Elektromotor besitzt eine Nennleistung von 5 kW. Diese Angabe bezieht sich auf einen Betriebspunkt bei 3.500 U/min, an dem die Maschine ein Drehmoment von 14 Nm bereitstellt. Wie die Gegenüberstellung von Motor- und Propellerkennlinie jedoch zeigt, ist dieser Betriebspunkt in der vorliegenden Anwendung ohne zusätzliche Untersetzung nicht erreichbar.
Tatsächlich arbeitet der Motor in Kombination mit dem vorhandenen Propeller nur in einem vergleichsweise kleinen Bereich seines möglichen Drehzahlspektrums. Die nominelle Leistung von 5 kW kann daher im praktischen Betrieb nicht vollständig abgerufen werden. Die maximal abgerufene Leistung liegt aufgrund des limitierten Drehmoments von 28 Nm und einer Drehzahl von 850 bei etwa 2,5 kW.
Auch die Praxis hat gezeigt, dass die maximale Drehzahl des Antriebs bei „Vollgas“ im Bereich zwischen 850 und 900 U/min liegt.
Dauerbetrieb und thermische Belastung
Wird die Maschine dauerhaft im Bereich ihres maximalen Drehmoments betrieben, ist mit einem sinkenden Wirkungsgrad und einer deutlichen Erwärmung des Motors zu rechnen. Dies zeigte sich auch in der Praxis. Eine Möglichkeit, die Belastung der Maschine zu reduzieren, wäre der Einsatz einer Untersetzung. Dadurch könnte der Motor bei höherer Drehzahl arbeiten, während gleichzeitig das von ihm aufzubringende Drehmoment sinkt.
Da die Maschine bei rund um das Nennmoment (14Nm) sehr effizient arbeitet liegt bei einer direkten Maschinen-Wellenkupplung eine gute Drehzahl für den Dauerbetrieb bei etwa 600 U/min. In diesem Betriebszustand erreicht die Timpe Te bei Flaute – also genau in dem Einsatzbereich, in dem der Elektroantrieb über längere Zeit genutzt wird – eine Geschwindigkeit von rund vier Knoten bei einer elektrischen Leistungsaufnahme von etwa 900 W.
Theoretische Betrachtung einer Untersetzung
Eine interessante Fragestellung ergibt sich aus der Überlegung, den Motor nicht direkt mit der Propellerwelle zu koppeln, sondern eine Untersetzung vorzusehen. Der Motor könnte dadurch bei höheren Drehzahlen betrieben werden.
Bei einer Untersetzung von 2:1 würde sich die Drehzahl der Propellerwelle halbieren, während sich das an der Welle verfügbare Drehmoment verdoppelt. Der Motor könnte somit bei gleicher Propellerdrehzahl mit der doppelten Drehzahl laufen. Da Elektromotoren häufig bei höheren Drehzahlen effizienter arbeiten, erscheint eine solche Lösung auf den ersten Blick durchaus attraktiv.
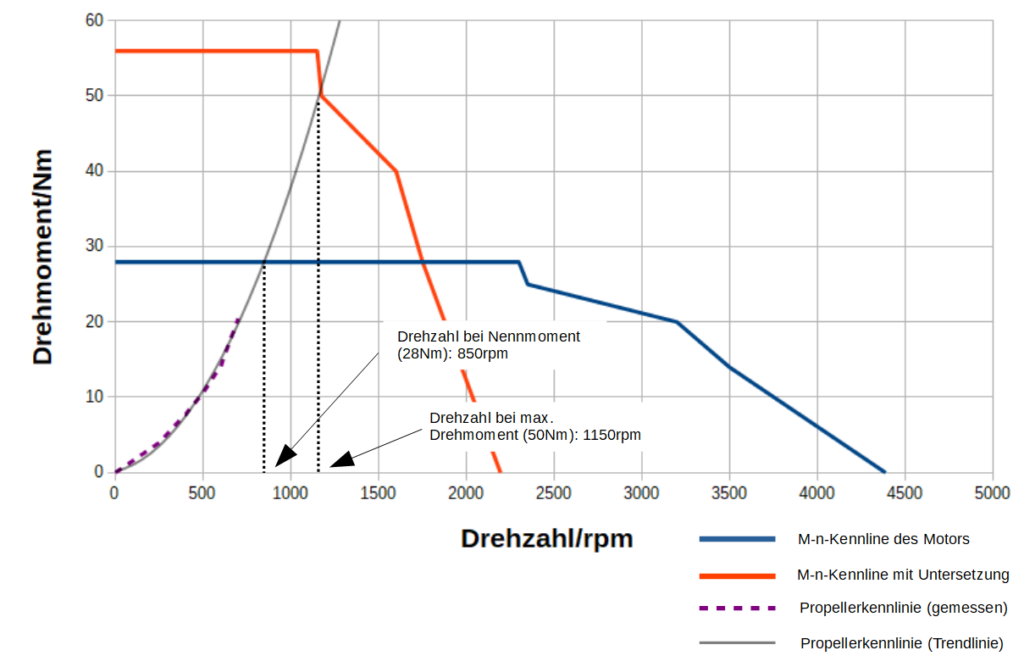
Durch die Untersetzung verschiebt sich die Drehmoment-Drehzahl-Kennlinie des Antriebs (Betrachtung der Propellerwelle) in Richtung höherer Drehmomente. Der Schnittpunkt mit der Propellerkennlinie wandert dadurch zu höheren Propellerdrehzahlen.
Die theoretische Analyse zeigt, dass sich die maximal erreichbare Propellerdrehzahl auf etwa 1.150 U/min erhöhen würde. Die Motordrehzahl läge dabei aufgrund der Untersetzung bei rund 2.300 U/min. Gleichzeitig könnte eine mechanische Leistung von ungefähr 6 kW auf die Propellerwelle übertragen werden.
Eine solche Konfiguration bietet insbesondere dann Vorteile, wenn über längere Zeiträume hohe Schubkräfte benötigt werden, beispielsweise bei Fahrten gegen starke Strömungen, bei Gegenwind oder unter allgemein anspruchsvollen Wetterbedingungen. In diesen Situationen könnte der Motor seine Leistungsfähigkeit besser ausnutzen und gleichzeitig in einem günstigeren Wirkungsgradbereich arbeiten.
Dem stehen jedoch die zusätzlichen Verluste eines Untersetzungsgetriebes oder Riementriebs gegenüber. Darüber hinaus erhöht sich die mechanische Komplexität des Gesamtsystems, was zusätzlichen Bauraum, Wartungsaufwand und potenzielle Fehlerquellen mit sich bringt.
Für das vorgesehene Einsatzprofil eines Segelbootes stellt sich daher die Frage, ob die zusätzliche Leistung im praktischen Betrieb überhaupt benötigt wird. Da der Motor überwiegend bei Flaute zum Einsatz kommt und die vorhandene Direktkopplung bereits ausreichende Fahrleistungen ermöglicht, erscheint der Nutzen einer Untersetzung im Verhältnis zum zusätzlichen Aufwand begrenzt.
Am Ende bleibt natürlich noch eine weitere Option: der Austausch des Propellers, beispielsweise gegen ein kleineres Modell mit geringerer Steigung. Dadurch würde sich der Betriebspunkt des Gesamtsystems ebenfalls verschieben und der Motor könnte unter Umständen in einem günstigeren Arbeitsbereich betrieben werden. Allerdings sind damit auch Nachteile verbunden. Kleinere, schnell drehende Propeller arbeiten in der Regel weniger effizient als große, langsam laufende Propeller mit höherer Steigung. Ein solcher Wechsel würde daher auf Seiten des Propellers zu zusätzlichen Verlusten führen.
Letztlich handelt es sich somit stets um eine Abwägung zwischen verschiedenen Zielgrößen wie Effizienz, Leistungsfähigkeit und konstruktivem Aufwand. Welche Lösung sinnvoll ist, hängt maßgeblich vom jeweiligen Einsatzprofil und den gesetzten Prioritäten ab.
Vergleich mit der ursprünglichen Dieselmaschine
Besonders interessant ist der Vergleich mit dem ursprünglich eingebauten Dieselmotor. Dieser verfügte über eine Nennleistung von 11,5 kW und war damit auf dem Papier mehr als doppelt so leistungsstark wie der eingesetzte Elektromotor.
Betrachtet man jedoch die tatsächlichen Betriebsbedingungen, ergibt sich ein differenzierteres Bild. Der Dieselmotor stellte über den Drehzahlbereich ein maximales Drehmoment von etwa 25 bis 30 Nm bereit. Bei der im Betrieb tatsächlich erreichten Drehzahl lag das Moment sogar unter dem des 5-kW-Elektromotors (28 Nm bei 850 U/min).
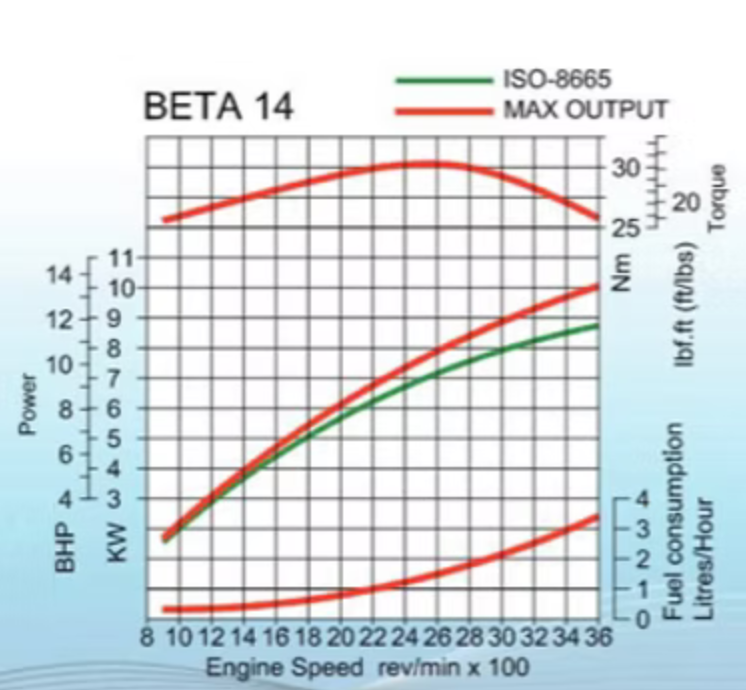
Auch die Nennleistung des Dieselmotors wurde bei rund 3.600 U/min angegeben. In Kombination mit dem verwendeten Propeller wurde dieser Betriebspunkt im praktischen Einsatz nie erreicht. Die Leistung war auch hier auf ca. 2,5 kW durch das Drehmoment begrenzt
Fazit
Die Analyse des Antriebssystems verdeutlicht, dass die Auslegung eines Bootsantriebes nicht allein anhand der Motorleistung erfolgen kann. Entscheidend ist vielmehr das Zusammenspiel von Motor, Propeller und einer eventuellen Untersetzung.
Die Rekonstruktion der Propellerkennlinie zeigt, dass der verwendete Propeller bereits bei einer mechanischen Leistung von etwa 2,5 kW den maximal erreichbaren Arbeitspunkt des Systems bestimmt.
Die theoretische Betrachtung einer Untersetzung verdeutlicht zwar das Potenzial für höhere Drehzahlen und größere Leistungsübertragung, zeigt aber gleichzeitig, dass dies für das tatsächliche Einsatzprofil nur begrenzte Vorteile bietet.
Für einen Segelbootantrieb, der überwiegend für Hafenmanöver, Ankerarbeiten und gelegentliche Flautenfahrten genutzt wird, erweist sich die direkte Kupplung als eine einfache, robuste und effiziente Lösung. Die Untersuchungen bestätigen auch, dass auch vergleichsweise kompakte Elektromotoren bei sorgfältiger Abstimmung mit dem Propeller einen vollwertigen Ersatz für nominell deutlich leistungsstärkere Verbrennungsmotoren darstellen können.